버전 2022.45.15
2023년 4월 8일 출시
릴리스 맵
현재 글로벌 배포
배포율
일별 차량 전체 출시
릴리스 정보
FSD 베타 v11.3.6
2022.45.15에 포함
- 고속도로에서 FSD 베타를 활성화했습니다. 이는 고속도로 안팎의 비전 및 계획 스택을 통합하고 4년이 넘은 레거시 고속도로 스택을 대체합니다. 레거시 고속도로 스택은 여전히 여러 대의 단일 카메라와 단일 프레임 네트워크에 의존하며 간단한 차선별 기동을 처리하도록 설정되어 있습니다. FSD 베타의 멀티 카메라 비디오 네트워크와 차세대 플래너는 차선에 대한 의존도를 줄이면서 더 복잡한 에이전트 상호 작용을 가능하게 하여 더 지능적인 행동, 더 원활한 제어 및 더 나은 의사 결정을 추가할 수 있는 길을 열어줍니다.
- 차량에서 추가로 채굴한 3만 개의 자동 라벨링 클립을 통해 특히 대형 트럭 및 고요율 시나리오에서 근접 컷인 사례에 대한 리콜을 15% 개선했습니다. 또한 컷인 물체에 대한 전용 속도 제어를 확장하고 조정했습니다.
- 넓은 차선에서 에고의 위치를 다른 차량이 에고 주변에서 기동할 수 있도록 다가오는 회전 방향으로 치우쳐서 개선했습니다.
- 곡률이 높거나 대형 트럭이 있는 시나리오에서 차선을 오프셋하여 도로의 다른 차량과 안전 거리를 유지하고 승차감을 높여 핸들링이 개선되었습니다.
- 밀집된 교통 상황에서 경로 차단 차선 변경 시 동작이 개선되었습니다. 이제 Ego는 막힌 차선에서 더 많은 진로를 유지하여 밀집된 교통 체증에서 발생할 수 있는 틈새를 헤지합니다.
- 정렬 단계에서 더 높은 가속을 허용하여 교통량이 밀집된 시나리오에서 차선 변경이 개선되었습니다. 그 결과 보다 자연스럽게 간격을 선택해 인접 차선 차량을 에고에 가깝게 추월할 수 있습니다.
- 차선, 선, 도로 가장자리 예측 간의 감지 일관성을 개선하여 더 부드러운 회전이 가능해졌습니다. 이는 최신 버전의 차선 안내 모듈을 도로 가장자리 및 라인 네트워크에 통합하여 달성했습니다.
- 다른 차량의 움직임을 감지하는 정확도가 향상되었습니다. 다른 차량이 주행으로 전환하는 경우의 정확도가 23% 향상되고 오토파일럿이 선행 차량을 주차된 것으로 잘못 감지하는 경우의 오류가 12% 감소했습니다. 이는 네트워크의 비디오 컨텍스트를 늘리고, 이러한 시나리오의 데이터를 더 많이 추가하고, 제어 관련 차량의 손실 페널티를 높임으로써 달성할 수 있었습니다.
- 최대 궤적 최적화 지평이 확장되어 고속 주행 시 곡률이 높은 도로와 멀리 떨어진 차량을 더 부드럽게 제어할 수 있습니다.
- 좁은 차선에서 주차된 차량 옆에서 불필요하게 차선을 변경하거나 속도를 줄이는 대신 차선을 벗어나거나 차선 내에 머무르는 것을 선호하는 운전 행동이 개선되었습니다.
- 비전 기반 로컬라이제이션과 거친 지도 차선 수를 더 잘 융합하여 연속적인 차선 변경 기동을 개선했습니다.
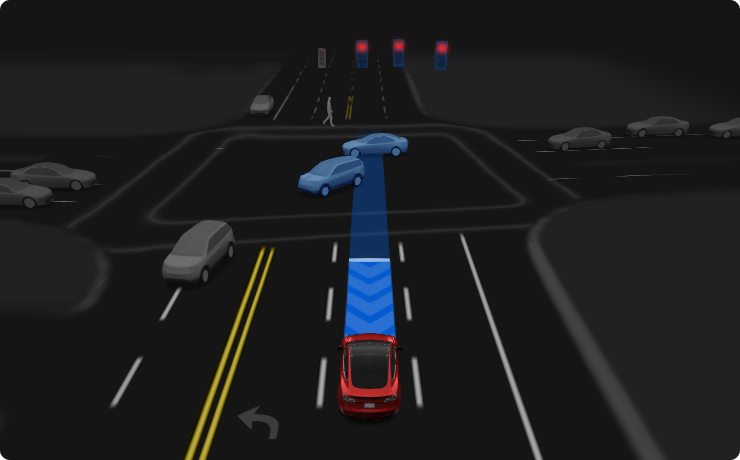
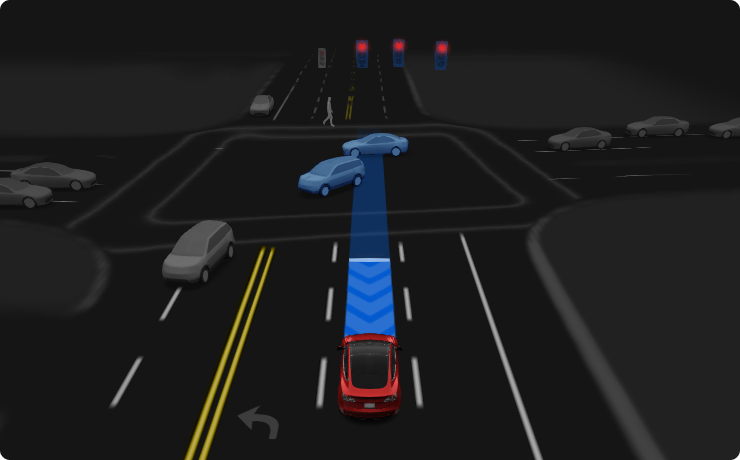
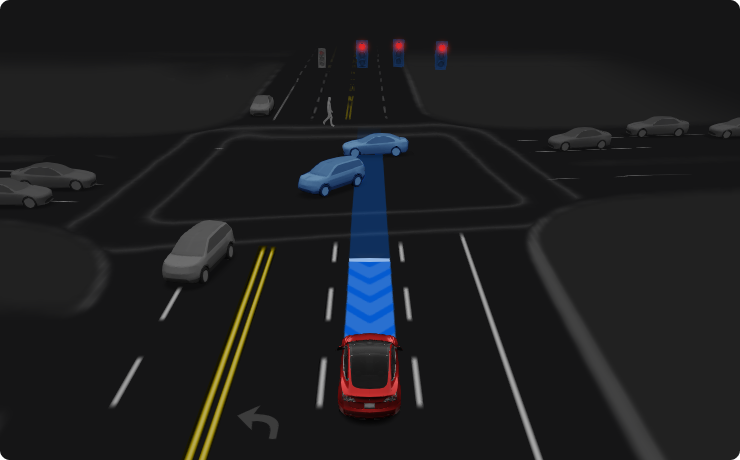
- 사용자 인터페이스에 텍스트 블러브를 추가하여 FSD 베타에서 예정된 기동을 알릴 수 있도록 했습니다. 또한 차량의 경로를 따라 다가오는 감속의 시각화도 개선했습니다. 셰브론은 다양한 불투명도와 속도로 렌더링되어 감속 강도를 나타내며, 차량이 정지할 위치에는 실선이 표시됩니다.
- 특히 세미트럭의 위치 오차를 10% 줄이고, 100m 이상 떨어진 차량의 인식률과 정확도를 각각 3%와 7% 높였으며, 오토바이의 인식률을 5% 높이는 등 물체 인식률과 정확도를 향상시켰습니다. 이는 200만 개의 비디오 클립 자동 라벨링 데이터 세트에 추가적인 품질 검사를 구현함으로써 달성할 수 있었습니다.
- 저속 시나리오에서 오브젝트 운동학 모델링을 개선하여 넓은 차선 및 교차로 근처에서 오브젝트 주변의 잘못된 오프셋을 줄였습니다.
- FSD 베타가 활성화된 경우 자동 사각지대 카메라의 위치를 조정하여 오토파일럿 시각화의 우선순위를 지정할 수 있습니다. 카메라를 드래그하여 사용자 지정 위치를 저장합니다.
무선(OTA) 리콜
2022.45.15에 포함
최근 리콜(미국 캠페인 #23V085, 캐나다 캠페인 #2023-063)에 따라 Tesla는 FSD 베타 내에서 다음과 같은 특정 동작을 개선하고 있습니다:
1. 정지 시 필요한 감속, 교차로 진입 및 퇴장 시간, 신호등이 적색으로 전환되기 전 교차로 통과 거리 등을 고려하는 트레이드오프 프레임워크로 결정을 모델링하여 특정 황색 신호등에서 진행 또는 정지하는 결정 로직이 개선되었습니다. 이를 통해 황색 신호등 처리가 보다 자연스럽고 사람처럼 느껴질 것입니다.
2. 정지 신호 교차로 진입 시 종방향 감속 제어 프로파일을 개선하여 전반적인 조작이 더욱 인지 가능하고 자연스럽게 느껴지도록 개선했습니다.
3. 감지된 속도 제한 표지판을 더 일찍 제어할 수 있도록 하여 특정 속도 구역에 진입할 때 Tesla의 속도 조정 기능을 개선했습니다. 속도 제한 표지판을 감지하여 감속할 때 반응의 강도는 현재 속도와 감지된 표지판에 표시된 속도와의 차이에 따라 결정됩니다. 차량의 설정 속도가 감지된 제한 속도를 50% 이상 초과할 때 운전자에게 경고하기 위해 사용자 인터페이스의 제한 속도 아이콘 뒤에 시각적 불빛이 추가되었습니다. 마지막으로, FSD 베타에서 절대 속도 제한 오프셋 옵션이 제거되어 백분율 기반 오프셋만 사용할 수 있습니다.
4. Tesla가 회전 차선을 벗어나 직진으로 계속 주행할 수 있는 특정 시나리오의 동작을 업데이트했습니다. 이제 이러한 동작은 차선 변경으로 처리되며, 방향 지시등은 다른 운전자에게 Tesla의 의도를 알리는 데 사용됩니다.
다시 한 번 말씀드리지만, FSD 베타가 작동 중일 때에도 차량 운행에 대한 책임은 운전자에게 있습니다. 운전자는 지속적으로 도로를 감독하고 운전대를 계속 잡고 안전을 유지하기 위해 개입할 준비가 되어 있어야 합니다.
FSD 베타 v11.3.5
2022.45.14에 포함
- 고속도로에서 FSD 베타를 활성화했습니다. 이는 고속도로 안팎의 비전 및 계획 스택을 통합하고 4년이 넘은 레거시 고속도로 스택을 대체합니다. 레거시 고속도로 스택은 여전히 여러 대의 단일 카메라와 단일 프레임 네트워크에 의존하며 간단한 차선별 기동을 처리하도록 설정되어 있습니다. FSD 베타의 멀티 카메라 비디오 네트워크와 차세대 플래너는 차선에 대한 의존도를 줄이면서 더 복잡한 에이전트 상호 작용을 가능하게 하여 더 지능적인 행동, 더 원활한 제어 및 더 나은 의사 결정을 추가할 수 있는 길을 열어줍니다.
- 차량에서 추가로 채굴한 3만 개의 자동 라벨링 클립을 통해 특히 대형 트럭 및 고요율 시나리오에서 근접 컷인 사례에 대한 리콜을 15% 개선했습니다. 또한 컷인 물체에 대한 전용 속도 제어를 확장하고 조정했습니다.
- 넓은 차선에서 에고의 위치를 다른 차량이 에고 주변에서 기동할 수 있도록 다가오는 회전 방향으로 치우쳐서 개선했습니다.
- 곡률이 높거나 대형 트럭이 있는 시나리오에서 차선을 오프셋하여 도로의 다른 차량과 안전 거리를 유지하고 승차감을 높여 핸들링이 개선되었습니다.
- 밀집된 교통 상황에서 경로 차단 차선 변경 시 동작이 개선되었습니다. 이제 Ego는 막힌 차선에서 더 많은 진로를 유지하여 밀집된 교통 체증에서 발생할 수 있는 틈새를 헤지합니다.
- 정렬 단계에서 더 높은 가속을 허용하여 교통량이 밀집된 시나리오에서 차선 변경이 개선되었습니다. 그 결과 보다 자연스럽게 간격을 선택해 인접 차선 차량을 에고에 가깝게 추월할 수 있습니다.
- 차선, 선, 도로 가장자리 예측 간의 감지 일관성을 개선하여 더 부드러운 회전이 가능해졌습니다. 이는 최신 버전의 차선 안내 모듈을 도로 가장자리 및 라인 네트워크에 통합하여 달성했습니다.
- 다른 차량의 움직임을 감지하는 정확도가 향상되었습니다. 다른 차량이 주행으로 전환하는 경우의 정확도가 23% 향상되고 오토파일럿이 선행 차량을 주차된 것으로 잘못 감지하는 경우의 오류가 12% 감소했습니다. 이는 네트워크의 비디오 컨텍스트를 늘리고, 이러한 시나리오의 데이터를 더 많이 추가하고, 제어 관련 차량의 손실 페널티를 높임으로써 달성할 수 있었습니다.
- 최대 궤적 최적화 지평이 확장되어 고속 주행 시 곡률이 높은 도로와 멀리 떨어진 차량을 더 부드럽게 제어할 수 있습니다.
- 좁은 차선에서 주차된 차량 옆에서 불필요하게 차선을 변경하거나 속도를 줄이는 대신 차선을 벗어나거나 차선 내에 머무르는 것을 선호하는 운전 행동이 개선되었습니다.
- 비전 기반 로컬라이제이션과 거친 지도 차선 수를 더 잘 융합하여 연속적인 차선 변경 기동을 개선했습니다.
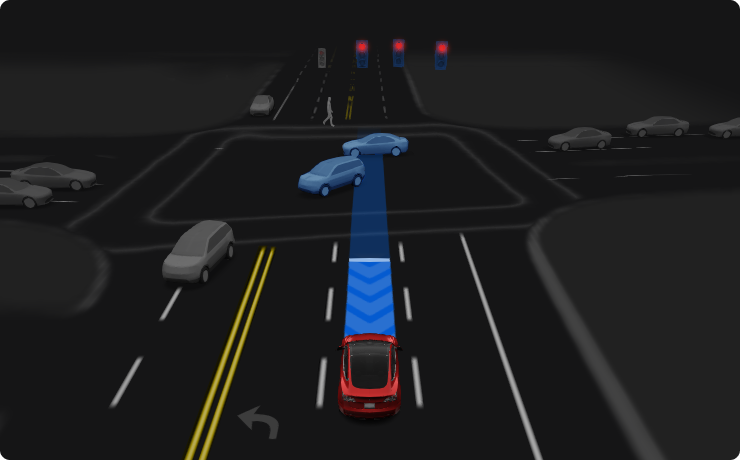
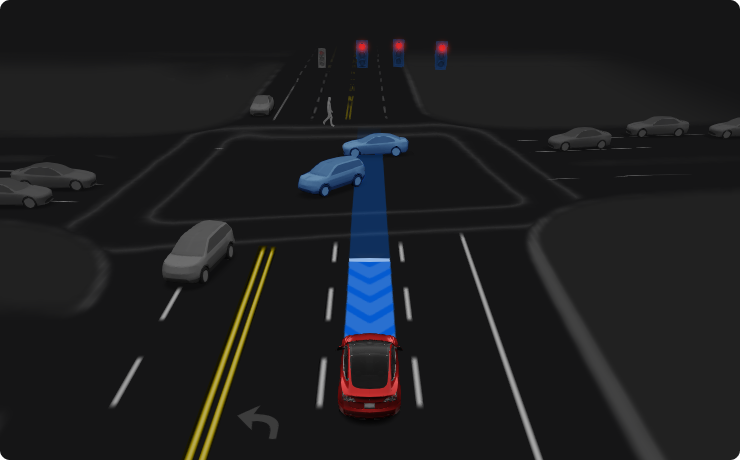
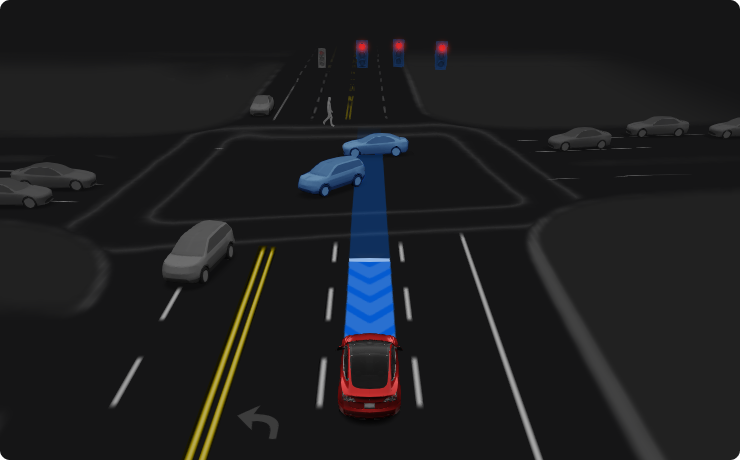
- 사용자 인터페이스에 텍스트 블러브를 추가하여 FSD 베타에서 예정된 기동을 알릴 수 있도록 했습니다. 또한 차량의 경로를 따라 다가오는 감속의 시각화도 개선했습니다. 셰브론은 다양한 불투명도와 속도로 렌더링되어 감속 강도를 나타내며, 차량이 정지할 위치에는 실선이 표시됩니다.
- 특히 세미트럭의 위치 오차를 10% 줄이고, 100m 이상 떨어진 차량의 인식률과 정확도를 각각 3%와 7% 높였으며, 오토바이의 인식률을 5% 높이는 등 물체 인식률과 정확도를 향상시켰습니다. 이는 200만 개의 비디오 클립 자동 라벨링 데이터 세트에 추가적인 품질 검사를 구현함으로써 달성할 수 있었습니다.
- 저속 시나리오에서 오브젝트 운동학 모델링을 개선하여 넓은 차선 및 교차로 근처에서 오브젝트 주변의 잘못된 오프셋을 줄였습니다.
- FSD 베타가 활성화된 경우 자동 사각지대 카메라의 위치를 조정하여 오토파일럿 시각화의 우선순위를 지정할 수 있습니다. 카메라를 드래그하여 사용자 지정 위치를 저장합니다.
무선(OTA) 리콜
2022.45.14에 포함
최근 리콜(미국 캠페인 #23V085, 캐나다 캠페인 #2023-063)에 따라 Tesla는 FSD 베타 내에서 다음과 같은 특정 동작을 개선하고 있습니다:
1. 정지 시 필요한 감속, 교차로 진입 및 퇴장 시간, 신호등이 적색으로 전환되기 전 교차로 통과 거리 등을 고려하는 트레이드오프 프레임워크로 결정을 모델링하여 특정 황색 신호등에서 진행 또는 정지하는 결정 로직이 개선되었습니다. 이를 통해 황색 신호등 처리가 보다 자연스럽고 사람처럼 느껴질 것입니다.
2. 정지 신호 교차로 진입 시 종방향 감속 제어 프로파일을 개선하여 전반적인 조작이 더욱 인지 가능하고 자연스럽게 느껴지도록 개선했습니다.
3. 감지된 속도 제한 표지판을 더 일찍 제어할 수 있도록 하여 특정 속도 구역에 진입할 때 Tesla의 속도 조정 기능을 개선했습니다. 속도 제한 표지판을 감지하여 감속할 때 반응의 강도는 현재 속도와 감지된 표지판에 표시된 속도와의 차이에 따라 결정됩니다. 차량의 설정 속도가 감지된 제한 속도를 50% 이상 초과할 때 운전자에게 경고하기 위해 사용자 인터페이스의 제한 속도 아이콘 뒤에 시각적 불빛이 추가되었습니다. 마지막으로, FSD 베타에서 절대 속도 제한 오프셋 옵션이 제거되어 백분율 기반 오프셋만 사용할 수 있습니다.
4. Tesla가 회전 차선을 벗어나 직진으로 계속 주행할 수 있는 특정 시나리오의 동작을 업데이트했습니다. 이제 이러한 동작은 차선 변경으로 처리되며, 방향 지시등은 다른 운전자에게 Tesla의 의도를 알리는 데 사용됩니다.
다시 한 번 말씀드리지만, FSD 베타가 작동 중일 때에도 차량 운행에 대한 책임은 운전자에게 있습니다. 운전자는 지속적으로 도로를 감독하고 운전대를 계속 잡고 안전을 유지하기 위해 개입할 준비가 되어 있어야 합니다.
FSD 베타 v11.3.4
2022.45.13에 포함
- 고속도로에서 FSD 베타를 활성화했습니다. 이는 고속도로 안팎의 비전 및 계획 스택을 통합하고 4년이 넘은 레거시 고속도로 스택을 대체합니다. 레거시 고속도로 스택은 여전히 여러 대의 단일 카메라와 단일 프레임 네트워크에 의존하며 간단한 차선별 기동을 처리하도록 설정되어 있습니다. FSD 베타의 멀티 카메라 비디오 네트워크와 차세대 플래너는 차선에 대한 의존도를 줄이면서 더 복잡한 에이전트 상호 작용을 가능하게 하여 더 지능적인 행동, 더 원활한 제어 및 더 나은 의사 결정을 추가할 수 있는 길을 열어줍니다.
- 차량에서 추가로 채굴한 3만 개의 자동 라벨링 클립을 통해 특히 대형 트럭 및 고요율 시나리오에서 근접 컷인 사례에 대한 리콜을 15% 개선했습니다. 또한 컷인 물체에 대한 전용 속도 제어를 확장하고 조정했습니다.
- 넓은 차선에서 에고의 위치를 다른 차량이 에고 주변에서 기동할 수 있도록 다가오는 회전 방향으로 치우쳐서 개선했습니다.
- 곡률이 높거나 대형 트럭이 있는 시나리오에서 차선을 오프셋하여 도로의 다른 차량과 안전 거리를 유지하고 승차감을 높여 핸들링이 개선되었습니다.
- 밀집된 교통 상황에서 경로 차단 차선 변경 시 동작이 개선되었습니다. 이제 Ego는 막힌 차선에서 더 많은 진로를 유지하여 밀집된 교통 체증에서 발생할 수 있는 틈새를 헤지합니다.
- 정렬 단계에서 더 높은 가속을 허용하여 교통량이 밀집된 시나리오에서 차선 변경이 개선되었습니다. 그 결과 보다 자연스럽게 간격을 선택해 인접 차선 차량을 에고에 가깝게 추월할 수 있습니다.
- 차선, 선, 도로 가장자리 예측 간의 감지 일관성을 개선하여 더 부드러운 회전이 가능해졌습니다. 이는 최신 버전의 차선 안내 모듈을 도로 가장자리 및 라인 네트워크에 통합하여 달성했습니다.
- 다른 차량의 움직임을 감지하는 정확도가 향상되었습니다. 다른 차량이 주행으로 전환하는 경우의 정확도가 23% 향상되고 오토파일럿이 선행 차량을 주차된 것으로 잘못 감지하는 경우의 오류가 12% 감소했습니다. 이는 네트워크의 비디오 컨텍스트를 늘리고, 이러한 시나리오의 데이터를 더 많이 추가하고, 제어 관련 차량의 손실 페널티를 높임으로써 달성할 수 있었습니다.
- 최대 궤적 최적화 지평이 확장되어 고속 주행 시 곡률이 높은 도로와 멀리 떨어진 차량을 더 부드럽게 제어할 수 있습니다.
- 좁은 차선에서 주차된 차량 옆에서 불필요하게 차선을 변경하거나 속도를 줄이는 대신 차선을 벗어나거나 차선 내에 머무르는 것을 선호하는 운전 행동이 개선되었습니다.
- 비전 기반 로컬라이제이션과 거친 지도 차선 수를 더 잘 융합하여 연속적인 차선 변경 기동을 개선했습니다.
- 사용자 인터페이스에 텍스트 블러브를 추가하여 FSD 베타에서 예정된 기동을 알릴 수 있도록 했습니다. 또한 차량의 경로를 따라 다가오는 감속의 시각화도 개선했습니다. 셰브론은 다양한 불투명도와 속도로 렌더링되어 감속 강도를 나타내며, 차량이 정지할 위치에는 실선이 표시됩니다.
- 특히 세미트럭의 위치 오차를 10% 줄이고, 100m 이상 떨어진 차량의 인식률과 정확도를 각각 3%와 7% 높였으며, 오토바이의 인식률을 5% 높이는 등 물체 인식률과 정확도를 향상시켰습니다. 이는 200만 개의 비디오 클립 자동 라벨링 데이터 세트에 추가적인 품질 검사를 구현함으로써 달성할 수 있었습니다.
- 저속 시나리오에서 오브젝트 운동학 모델링을 개선하여 넓은 차선 및 교차로 근처에서 오브젝트 주변의 잘못된 오프셋을 줄였습니다.
- FSD 베타가 활성화된 경우 자동 사각지대 카메라의 위치를 조정하여 오토파일럿 시각화의 우선순위를 지정할 수 있습니다. 카메라를 드래그하여 사용자 지정 위치를 저장합니다.
무선(OTA) 리콜
2022.45.13에 포함
최근 리콜(미국 캠페인 #23V085, 캐나다 캠페인 #2023-063)에 따라 Tesla는 FSD 베타 내에서 다음과 같은 특정 동작을 개선하고 있습니다:
1. 정지 시 필요한 감속, 교차로 진입 및 퇴장 시간, 신호등이 적색으로 전환되기 전 교차로 통과 거리 등을 고려하는 트레이드오프 프레임워크로 결정을 모델링하여 특정 황색 신호등에서 진행 또는 정지하는 결정 로직이 개선되었습니다. 이를 통해 황색 신호등 처리가 보다 자연스럽고 사람처럼 느껴질 것입니다.
2. 정지 신호 교차로 진입 시 종방향 감속 제어 프로파일을 개선하여 전반적인 조작이 더욱 인지 가능하고 자연스럽게 느껴지도록 개선했습니다.
3. 감지된 속도 제한 표지판을 더 일찍 제어할 수 있도록 하여 특정 속도 구역에 진입할 때 Tesla의 속도 조정 기능을 개선했습니다. 속도 제한 표지판을 감지하여 감속할 때 반응의 강도는 현재 속도와 감지된 표지판에 표시된 속도와의 차이에 따라 결정됩니다. 차량의 설정 속도가 감지된 제한 속도를 50% 이상 초과할 때 운전자에게 경고하기 위해 사용자 인터페이스의 제한 속도 아이콘 뒤에 시각적 불빛이 추가되었습니다. 마지막으로, FSD 베타에서 절대 속도 제한 오프셋 옵션이 제거되어 백분율 기반 오프셋만 사용할 수 있습니다.
4. Tesla가 회전 차선을 벗어나 직진으로 계속 주행할 수 있는 특정 시나리오의 동작을 업데이트했습니다. 이제 이러한 동작은 차선 변경으로 처리되며, 방향 지시등은 다른 운전자에게 Tesla의 의도를 알리는 데 사용됩니다.
다시 한 번 말씀드리지만, FSD 베타가 작동 중일 때에도 차량 운행에 대한 책임은 운전자에게 있습니다. 운전자는 지속적으로 도로를 감독하고 운전대를 계속 잡고 안전을 유지하기 위해 개입할 준비가 되어 있어야 합니다.
FSD 베타 v11.3.3
2022.45.12에 포함
- 고속도로에서 FSD 베타를 활성화했습니다. 이는 고속도로 안팎의 비전 및 계획 스택을 통합하고 4년이 넘은 레거시 고속도로 스택을 대체합니다. 레거시 고속도로 스택은 여전히 여러 대의 단일 카메라와 단일 프레임 네트워크에 의존하며 간단한 차선별 기동을 처리하도록 설정되어 있습니다. FSD 베타의 멀티 카메라 비디오 네트워크와 차세대 플래너는 차선에 대한 의존도를 줄이면서 더 복잡한 에이전트 상호 작용을 가능하게 하여 더 지능적인 행동, 더 원활한 제어 및 더 나은 의사 결정을 추가할 수 있는 길을 열어줍니다.
- 차량에서 추가로 채굴한 3만 개의 자동 라벨링 클립을 통해 특히 대형 트럭 및 고요율 시나리오에서 근접 컷인 사례에 대한 리콜을 15% 개선했습니다. 또한 컷인 물체에 대한 전용 속도 제어를 확장하고 조정했습니다.
- 넓은 차선에서 에고의 위치를 다른 차량이 에고 주변에서 기동할 수 있도록 다가오는 회전 방향으로 치우쳐서 개선했습니다.
- 곡률이 높거나 대형 트럭이 있는 시나리오에서 차선을 오프셋하여 도로의 다른 차량과 안전 거리를 유지하고 승차감을 높여 핸들링이 개선되었습니다.
- 밀집된 교통 상황에서 경로 차단 차선 변경 시 동작이 개선되었습니다. 이제 Ego는 막힌 차선에서 더 많은 진로를 유지하여 밀집된 교통 체증에서 발생할 수 있는 틈새를 헤지합니다.
- 정렬 단계에서 더 높은 가속을 허용하여 교통량이 밀집된 시나리오에서 차선 변경이 개선되었습니다. 그 결과 보다 자연스럽게 간격을 선택해 인접 차선 차량을 에고에 가깝게 추월할 수 있습니다.
- 차선, 선, 도로 가장자리 예측 간의 감지 일관성을 개선하여 더 부드러운 회전이 가능해졌습니다. 이는 최신 버전의 차선 안내 모듈을 도로 가장자리 및 라인 네트워크에 통합하여 달성했습니다.
- 다른 차량의 움직임을 감지하는 정확도가 향상되었습니다. 다른 차량이 주행으로 전환하는 경우의 정확도가 23% 향상되고 오토파일럿이 선행 차량을 주차된 것으로 잘못 감지하는 경우의 오류가 12% 감소했습니다. 이는 네트워크의 비디오 컨텍스트를 늘리고, 이러한 시나리오의 데이터를 더 많이 추가하고, 제어 관련 차량의 손실 페널티를 높임으로써 달성할 수 있었습니다.
- 최대 궤적 최적화 지평이 확장되어 고속 주행 시 곡률이 높은 도로와 멀리 떨어진 차량을 더 부드럽게 제어할 수 있습니다.
- 좁은 차선에서 주차된 차량 옆에서 불필요하게 차선을 변경하거나 속도를 줄이는 대신 차선을 벗어나거나 차선 내에 머무르는 것을 선호하는 운전 행동이 개선되었습니다.
- 비전 기반 로컬라이제이션과 거친 지도 차선 수를 더 잘 융합하여 연속적인 차선 변경 기동을 개선했습니다.
- 사용자 인터페이스에 텍스트 블러브를 추가하여 FSD 베타에서 예정된 기동을 알릴 수 있도록 했습니다. 또한 차량의 경로를 따라 다가오는 감속의 시각화도 개선했습니다. 셰브론은 다양한 불투명도와 속도로 렌더링되어 감속 강도를 나타내며, 차량이 정지할 위치에는 실선이 표시됩니다.
- 특히 세미트럭의 위치 오차를 10% 줄이고, 100m 이상 떨어진 차량의 인식률과 정확도를 각각 3%와 7% 높였으며, 오토바이의 인식률을 5% 높이는 등 물체 인식률과 정확도를 향상시켰습니다. 이는 200만 개의 비디오 클립 자동 라벨링 데이터 세트에 추가적인 품질 검사를 구현함으로써 달성할 수 있었습니다.
- 저속 시나리오에서 오브젝트 운동학 모델링을 개선하여 넓은 차선 및 교차로 근처에서 오브젝트 주변의 잘못된 오프셋을 줄였습니다.
- FSD 베타가 활성화된 경우 자동 사각지대 카메라의 위치를 조정하여 오토파일럿 시각화의 우선순위를 지정할 수 있습니다. 카메라를 드래그하여 사용자 지정 위치를 저장합니다.
무선(OTA) 리콜
2022.45.12에 포함
최근 리콜(미국 캠페인 #23V085, 캐나다 캠페인 #2023-063)에 따라 Tesla는 FSD 베타 내에서 다음과 같은 특정 동작을 개선하고 있습니다:
1. 정지 시 필요한 감속, 교차로 진입 및 퇴장 시간, 신호등이 적색으로 전환되기 전 교차로 통과 거리 등을 고려하는 트레이드오프 프레임워크로 결정을 모델링하여 특정 황색 신호등에서 진행 또는 정지하는 결정 로직이 개선되었습니다. 이를 통해 황색 신호등 처리가 보다 자연스럽고 사람처럼 느껴질 것입니다.
2. 정지 신호 교차로 진입 시 종방향 감속 제어 프로파일을 개선하여 전반적인 조작이 더욱 인지 가능하고 자연스럽게 느껴지도록 개선했습니다.
3. 감지된 속도 제한 표지판을 더 일찍 제어할 수 있도록 하여 특정 속도 구역에 진입할 때 Tesla의 속도 조정 기능을 개선했습니다. 속도 제한 표지판을 감지하여 감속할 때 반응의 강도는 현재 속도와 감지된 표지판에 표시된 속도와의 차이에 따라 결정됩니다. 차량의 설정 속도가 감지된 제한 속도를 50% 이상 초과할 때 운전자에게 경고하기 위해 사용자 인터페이스의 제한 속도 아이콘 뒤에 시각적 불빛이 추가되었습니다. 마지막으로, FSD 베타에서 절대 속도 제한 오프셋 옵션이 제거되어 백분율 기반 오프셋만 사용할 수 있습니다.
4. Tesla가 회전 차선을 벗어나 직진으로 계속 주행할 수 있는 특정 시나리오의 동작을 업데이트했습니다. 이제 이러한 동작은 차선 변경으로 처리되며, 방향 지시등은 다른 운전자에게 Tesla의 의도를 알리는 데 사용됩니다.
다시 한 번 말씀드리지만, FSD 베타가 작동 중일 때에도 차량 운행에 대한 책임은 운전자에게 있습니다. 운전자는 지속적으로 도로를 감독하고 운전대를 계속 잡고 안전을 유지하기 위해 개입할 준비가 되어 있어야 합니다.
FSD 베타 v11.3.2
2022.45.11에 포함
- 고속도로에서 FSD 베타를 활성화했습니다. 이는 고속도로 안팎의 비전 및 계획 스택을 통합하고 4년이 넘은 레거시 고속도로 스택을 대체합니다. 레거시 고속도로 스택은 여전히 여러 대의 단일 카메라와 단일 프레임 네트워크에 의존하며 간단한 차선별 기동을 처리하도록 설정되어 있습니다. FSD 베타의 멀티 카메라 비디오 네트워크와 차세대 플래너는 차선에 대한 의존도를 줄이면서 더 복잡한 에이전트 상호 작용을 가능하게 하여 더 지능적인 행동, 더 원활한 제어 및 더 나은 의사 결정을 추가할 수 있는 길을 열어줍니다.
- 차량에서 추가로 채굴한 3만 개의 자동 라벨링 클립을 통해 특히 대형 트럭 및 고요율 시나리오에서 근접 컷인 사례에 대한 리콜을 15% 개선했습니다. 또한 컷인 물체에 대한 전용 속도 제어를 확장하고 조정했습니다.
- 넓은 차선에서 에고의 위치를 다른 차량이 에고 주변에서 기동할 수 있도록 다가오는 회전 방향으로 치우쳐서 개선했습니다.
- 곡률이 높거나 대형 트럭이 있는 시나리오에서 차선을 오프셋하여 도로의 다른 차량과 안전 거리를 유지하고 승차감을 높여 핸들링이 개선되었습니다.
- 밀집된 교통 상황에서 경로 차단 차선 변경 시 동작이 개선되었습니다. 이제 Ego는 막힌 차선에서 더 많은 진로를 유지하여 밀집된 교통 체증에서 발생할 수 있는 틈새를 헤지합니다.
- 정렬 단계에서 더 높은 가속을 허용하여 교통량이 밀집된 시나리오에서 차선 변경이 개선되었습니다. 그 결과 보다 자연스럽게 간격을 선택해 인접 차선 차량을 에고에 가깝게 추월할 수 있습니다.
- 차선, 선, 도로 가장자리 예측 간의 감지 일관성을 개선하여 더 부드러운 회전이 가능해졌습니다. 이는 최신 버전의 차선 안내 모듈을 도로 가장자리 및 라인 네트워크에 통합하여 달성했습니다.
- 다른 차량의 움직임을 감지하는 정확도가 향상되었습니다. 다른 차량이 주행으로 전환하는 경우의 정확도가 23% 향상되고 오토파일럿이 선행 차량을 주차된 것으로 잘못 감지하는 경우의 오류가 12% 감소했습니다. 이는 네트워크의 비디오 컨텍스트를 늘리고, 이러한 시나리오의 데이터를 더 많이 추가하고, 제어 관련 차량의 손실 페널티를 높임으로써 달성할 수 있었습니다.
- 최대 궤적 최적화 지평이 확장되어 고속 주행 시 곡률이 높은 도로와 멀리 떨어진 차량을 더 부드럽게 제어할 수 있습니다.
- 좁은 차선에서 주차된 차량 옆에서 불필요하게 차선을 변경하거나 속도를 줄이는 대신 차선을 벗어나거나 차선 내에 머무르는 것을 선호하는 운전 행동이 개선되었습니다.
- 비전 기반 로컬라이제이션과 거친 지도 차선 수를 더 잘 융합하여 연속적인 차선 변경 기동을 개선했습니다.
- 사용자 인터페이스에 텍스트 블러브를 추가하여 FSD 베타에서 예정된 기동을 알릴 수 있도록 했습니다. 또한 차량의 경로를 따라 다가오는 감속의 시각화도 개선했습니다. 셰브론은 다양한 불투명도와 속도로 렌더링되어 감속 강도를 나타내며, 차량이 정지할 위치에는 실선이 표시됩니다.
- 특히 세미트럭의 위치 오차를 10% 줄이고, 100m 이상 떨어진 차량의 인식률과 정확도를 각각 3%와 7% 높였으며, 오토바이의 인식률을 5% 높이는 등 물체 인식률과 정확도를 향상시켰습니다. 이는 200만 개의 비디오 클립 자동 라벨링 데이터 세트에 추가적인 품질 검사를 구현함으로써 달성할 수 있었습니다.
- 저속 시나리오에서 오브젝트 운동학 모델링을 개선하여 넓은 차선 및 교차로 근처에서 오브젝트 주변의 잘못된 오프셋을 줄였습니다.
- FSD 베타가 활성화된 경우 자동 사각지대 카메라의 위치를 조정하여 오토파일럿 시각화의 우선순위를 지정할 수 있습니다. 카메라를 드래그하여 사용자 지정 위치를 저장합니다.
무선(OTA) 리콜
2022.45.11에 포함
최근 리콜(미국 캠페인 #23V085, 캐나다 캠페인 #2023-063)에 따라 Tesla는 FSD 베타 내에서 다음과 같은 특정 동작을 개선하고 있습니다:
1. 정지 시 필요한 감속, 교차로 진입 및 퇴장 시간, 신호등이 적색으로 전환되기 전 교차로 통과 거리 등을 고려하는 트레이드오프 프레임워크로 결정을 모델링하여 특정 황색 신호등에서 진행 또는 정지하는 결정 로직이 개선되었습니다. 이를 통해 황색 신호등 처리가 보다 자연스럽고 사람처럼 느껴질 것입니다.
2. 정지 신호 교차로 진입 시 종방향 감속 제어 프로파일을 개선하여 전반적인 조작이 더욱 인지 가능하고 자연스럽게 느껴지도록 개선했습니다.
3. 감지된 속도 제한 표지판을 더 일찍 제어할 수 있도록 하여 특정 속도 구역에 진입할 때 Tesla의 속도 조정 기능을 개선했습니다. 속도 제한 표지판을 감지하여 감속할 때 반응의 강도는 현재 속도와 감지된 표지판에 표시된 속도와의 차이에 따라 결정됩니다. 차량의 설정 속도가 감지된 제한 속도를 50% 이상 초과할 때 운전자에게 경고하기 위해 사용자 인터페이스의 제한 속도 아이콘 뒤에 시각적 불빛이 추가되었습니다. 마지막으로, FSD 베타에서 절대 속도 제한 오프셋 옵션이 제거되어 백분율 기반 오프셋만 사용할 수 있습니다.
4. Tesla가 회전 차선을 벗어나 직진으로 계속 주행할 수 있는 특정 시나리오의 동작을 업데이트했습니다. 이제 이러한 동작은 차선 변경으로 처리되며, 방향 지시등은 다른 운전자에게 Tesla의 의도를 알리는 데 사용됩니다.
다시 한 번 말씀드리지만, FSD 베타가 작동 중일 때에도 차량 운행에 대한 책임은 운전자에게 있습니다. 운전자는 지속적으로 도로를 감독하고 운전대를 계속 잡고 안전을 유지하기 위해 개입할 준비가 되어 있어야 합니다.
FSD 베타 v11.3.1
2022.45.10에 포함
- 고속도로에서 FSD 베타를 활성화했습니다. 이는 고속도로 안팎의 비전 및 계획 스택을 통합하고 4년이 넘은 레거시 고속도로 스택을 대체합니다. 레거시 고속도로 스택은 여전히 여러 대의 단일 카메라와 단일 프레임 네트워크에 의존하며 간단한 차선별 기동을 처리하도록 설정되어 있습니다. FSD 베타의 멀티 카메라 비디오 네트워크와 차세대 플래너는 차선에 대한 의존도를 줄이면서 더 복잡한 에이전트 상호 작용을 가능하게 하여 더 지능적인 행동, 더 원활한 제어 및 더 나은 의사 결정을 추가할 수 있는 길을 열어줍니다.
- 차량에서 추가로 채굴한 3만 개의 자동 라벨링 클립을 통해 특히 대형 트럭 및 고요율 시나리오에서 근접 컷인 사례에 대한 리콜을 15% 개선했습니다. 또한 컷인 물체에 대한 전용 속도 제어를 확장하고 조정했습니다.
- 넓은 차선에서 에고의 위치를 다른 차량이 에고 주변에서 기동할 수 있도록 다가오는 회전 방향으로 치우쳐서 개선했습니다.
- 곡률이 높거나 대형 트럭이 있는 시나리오에서 차선을 오프셋하여 도로의 다른 차량과 안전 거리를 유지하고 승차감을 높여 핸들링이 개선되었습니다.
- 밀집된 교통 상황에서 경로 차단 차선 변경 시 동작이 개선되었습니다. 이제 Ego는 막힌 차선에서 더 많은 진로를 유지하여 밀집된 교통 체증에서 발생할 수 있는 틈새를 헤지합니다.
- 정렬 단계에서 더 높은 가속을 허용하여 교통량이 밀집된 시나리오에서 차선 변경이 개선되었습니다. 그 결과 보다 자연스럽게 간격을 선택해 인접 차선 차량을 에고에 가깝게 추월할 수 있습니다.
- 차선, 선, 도로 가장자리 예측 간의 감지 일관성을 개선하여 더 부드러운 회전이 가능해졌습니다. 이는 최신 버전의 차선 안내 모듈을 도로 가장자리 및 라인 네트워크에 통합하여 달성했습니다.
- 다른 차량의 움직임을 감지하는 정확도가 향상되었습니다. 다른 차량이 주행으로 전환하는 경우의 정확도가 23% 향상되고 오토파일럿이 선행 차량을 주차된 것으로 잘못 감지하는 경우의 오류가 12% 감소했습니다. 이는 네트워크의 비디오 컨텍스트를 늘리고, 이러한 시나리오의 데이터를 더 많이 추가하고, 제어 관련 차량의 손실 페널티를 높임으로써 달성할 수 있었습니다.
- 최대 궤적 최적화 지평이 확장되어 고속 주행 시 곡률이 높은 도로와 멀리 떨어진 차량을 더 부드럽게 제어할 수 있습니다.
- 좁은 차선에서 주차된 차량 옆에서 불필요하게 차선을 변경하거나 속도를 줄이는 대신 차선을 벗어나거나 차선 내에 머무르는 것을 선호하는 운전 행동이 개선되었습니다.
- 비전 기반 로컬라이제이션과 거친 지도 차선 수를 더 잘 융합하여 연속적인 차선 변경 기동을 개선했습니다.
- 사용자 인터페이스에 텍스트 블러브를 추가하여 FSD 베타에서 예정된 기동을 알릴 수 있도록 했습니다. 또한 차량의 경로를 따라 다가오는 감속의 시각화도 개선했습니다. 셰브론은 다양한 불투명도와 속도로 렌더링되어 감속 강도를 나타내며, 차량이 정지할 위치에는 실선이 표시됩니다.
- 특히 세미트럭의 위치 오차를 10% 줄이고, 100m 이상 떨어진 차량의 인식률과 정확도를 각각 3%와 7% 높였으며, 오토바이의 인식률을 5% 높이는 등 물체 인식률과 정확도를 향상시켰습니다. 이는 200만 개의 비디오 클립 자동 라벨링 데이터 세트에 추가적인 품질 검사를 구현함으로써 달성할 수 있었습니다.
- 저속 시나리오에서 오브젝트 운동학 모델링을 개선하여 넓은 차선 및 교차로 근처에서 오브젝트 주변의 잘못된 오프셋을 줄였습니다.
무선(OTA) 리콜
2022.45.10에 포함
최근 리콜(미국 캠페인 #23V085, 캐나다 캠페인 #2023-063)에 따라 Tesla는 FSD 베타 내에서 다음과 같은 특정 동작을 개선하고 있습니다:
1. 정지 시 필요한 감속, 교차로 진입 및 퇴장 시간, 신호등이 적색으로 전환되기 전 교차로 통과 거리 등을 고려하는 트레이드오프 프레임워크로 결정을 모델링하여 특정 황색 신호등에서 진행 또는 정지하는 결정 로직이 개선되었습니다. 이를 통해 황색 신호등 처리가 보다 자연스럽고 사람처럼 느껴질 것입니다.
2. 정지 신호 교차로 진입 시 종방향 감속 제어 프로파일을 개선하여 전반적인 조작이 더욱 인지 가능하고 자연스럽게 느껴지도록 개선했습니다.
3. 감지된 속도 제한 표지판을 더 일찍 제어할 수 있도록 하여 특정 속도 구역에 진입할 때 Tesla의 속도 조정 기능을 개선했습니다. 속도 제한 표지판을 감지하여 감속할 때 반응의 강도는 현재 속도와 감지된 표지판에 표시된 속도와의 차이에 따라 결정됩니다. 차량의 설정 속도가 감지된 제한 속도를 50% 이상 초과할 때 운전자에게 경고하기 위해 사용자 인터페이스의 제한 속도 아이콘 뒤에 시각적 불빛이 추가되었습니다. 마지막으로, FSD 베타에서 절대 속도 제한 오프셋 옵션이 제거되어 백분율 기반 오프셋만 사용할 수 있습니다.
4. Tesla가 회전 차선을 벗어나 직진으로 계속 주행할 수 있는 특정 시나리오의 동작을 업데이트했습니다. 이제 이러한 동작은 차선 변경으로 처리되며, 방향 지시등은 다른 운전자에게 Tesla의 의도를 알리는 데 사용됩니다.
다시 한 번 말씀드리지만, FSD 베타가 작동 중일 때에도 차량 운행에 대한 책임은 운전자에게 있습니다. 운전자는 지속적으로 도로를 감독하고 운전대를 계속 잡고 안전을 유지하기 위해 개입할 준비가 되어 있어야 합니다.